Sensore differenziale magnetoresistivo in vendita daPAM-XIAMENè uno dei sensori magnetoresistivi, che è confezionato dafilm sottile di antimoniuro di indio (InSb).magnetoresistore più magnete bias con guscio metallico. Di conseguenza, il segnale di uscita è un segnale d'onda quasi sinusoidale. Le specifiche del sensore magnetoresistivo differenziale (MR) fornite sono le seguenti:
Immagine del sensore magnetoresistivo differenziale
1. Scheda tecnica del sensore magnetoresistivo differenziale
Questo sensore di resistenza magnetica differenziale ha una bassa resistenza da 300 ohm a 900 ohm con una dimensione di Dia. 10 mm.
| Parametri tecnici | PAM10-10L | PAM10-10D |
| Tensione di lavoro massima | CC 10V | CC 10V |
| Tensione di lavoro nominale | DC 5V | DC 5V |
| Tensione di offset in uscita, a Vin
25℃δ=∞ |
130 mV | 130 mV |
| Ampiezza di uscita, 25℃δ=0.15mm,
Oggetto di destinazione standard |
900 mV | 1000 mV |
| Resistenza totale R1-3,25℃,
I<1mA, =∞ |
220-900Ω | 900-1600Ω |
| Asimmetria di resistenza (R12 e R13)25℃,δ=∞
|
≤10% | ≤10% |
| Frequenza di taglio | 20KHz | 20KHz |
| Temperatura di lavoro
|
-30~70℃ | -30~70℃ |
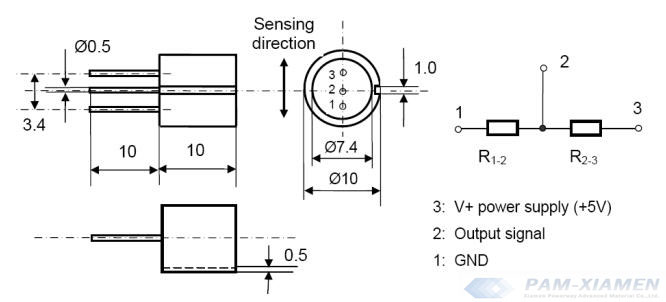
Dimensioni del sensore RM differenziale:
2. Che cos'è un sensore magnetoresistivo?
Il sensore di effetto magnetoresistivo è realizzato in base all'effetto di magnetoresistenza dei materiali magnetici. I materiali magnetici hanno caratteristiche di anisotropia. Durante la magnetizzazione, la direzione della magnetizzazione dipenderà dall'asse facile del materiale, dalla forma e dalla direzione del campo magnetico magnetizzante. Quando viene applicata una corrente I al materiale permalloy a forma di striscia, la resistenza del materiale dipende dall'angolo tra la direzione della corrente e la direzione della magnetizzazione.
Se al materiale viene applicato un campo magnetico B (il campo magnetico misurato), la direzione di magnetizzazione originale verrà ruotata. Se la direzione di magnetizzazione gira nella direzione perpendicolare alla corrente, la resistenza del materiale diminuirà; se la direzione di magnetizzazione gira nella direzione parallela alla corrente, la resistenza del materiale aumenterà. I sensori basati su magnetoresistivo sono generalmente costituiti da quattro di questi resistori e li collegano per formare un ponte. Sotto l'azione del campo magnetico misurato B, aumentano i valori di resistenza dei due resistori posti in posizioni opposte nel ponte, e diminuiscono i valori di resistenza degli altri due resistori.
3. Quali sono i tipi di sensori magnetoresistivi?
I sensori magnetoresistivi possono essere sostanzialmente suddivisi in due categorie:
In primo luogo, nell'applicazione di un campo magnetico elevato, quando l'intensità del campo applicato è sufficientemente elevata da saturare il materiale del sensore magnetico morbido, il vettore magnetico nel sensore è quasi parallelo al campo applicato. Pertanto, il sensore angolare magnetoresistivo senza contatto è un'applicazione comune del sensore magnetoresistivo ad alto campo.
In secondo luogo, come per l'applicazione a basso campo magnetico, la forma della striscia determina il vettore di magnetizzazione, poiché la magnetizzazione mostra una naturale preferenza per la reologia longitudinale. Il magnetico esterno causerà una distorsione di magnetizzazione nella striscia, modificando la resistenza per effetto MR. Pertanto, in questo modello viene solitamente utilizzato un sensore lineare a basso campo magnetico.
Sensore magnetoresistivo VS Sensore ad effetto Hall
La sensibilità e la linearità del sensore a magnetoresistenza sono state in grado di soddisfare i requisiti delle bussole magnetiche e le sue prestazioni in tutti gli aspetti sono significativamente migliori rispetto ai dispositivi Hall. L'errore di isteresi e la deriva della temperatura del punto zero possono essere eliminati anche alternando la magnetizzazione diretta e inversa del sensore MR. A causa di queste prestazioni superiori del sensore magnetoresistivo, può competere con fluxgate in alcune applicazioni.
4. Come funziona un sensore magnetoresistivo differenziale?
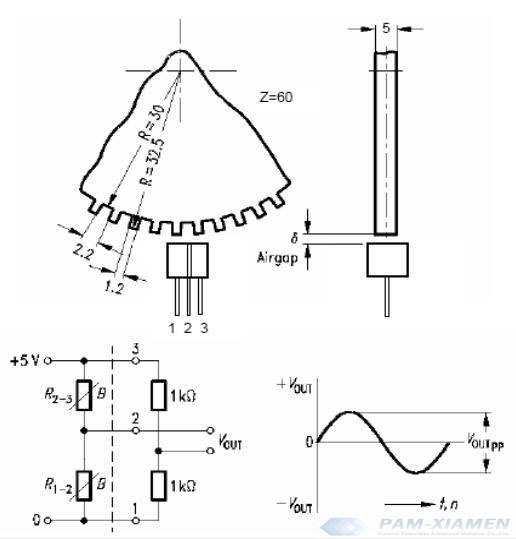
Imponenti campi magnetici di polarizzazione o ferro magnetico nella parte posteriore della riluttanza magnetica del film è la struttura centrale del sensore magnetoresistivo differenziale. Il campo magnetico in MR 1 e MR 2 aumenterà uno per uno, portando ad un aumento della resistenza di MR 1 e MR 2 quando gli oggetti ferromagnetici o il magnete attraversano l'area di rilevamento. Applicare una tensione di Vcc alla fine di e ③, ci sarà un'onda sinusoidale all'estremità ②. Si prega di vedere la Fig. in quanto segue:

5. Proprietà dei sensori magnetoresistivi differenziali
Ci sono molte caratteristiche del sensore magnetoresistivo differenziale:
- Può rilevare un'ampia gamma di velocità;
- Ha un robusto alloggiamento in metallo;
- L'ampiezza del segnale non ha nulla a che fare con la velocità;
- C'è un magnete di polarizzazione incorporato;
- È il migliore per ambienti difficili.
6. Applicazioni di sensori magnetoresistivi differenziali
A causa delle eccellenti proprietà del sensore di resistenza magnetica differenziale, può essere utilizzato in varie applicazioni, come il rilevamento della velocità, il rilevamento dell'angolo, il rilevamento del numero di giri dell'elettromandrino, la misurazione del numero di giri del punzone per PCB, la misurazione del piccolo spostamento lineare e così via. In particolare:
6.1 Misurazione del numero di giri del PCB mediante sensore magnetoresistivo differenziale
Il sensore di resistenza magnetica differenziale trova larga applicazione nella misura della velocità di rotori ferromagnetici, come dischi scanalati, ingranaggi e cremagliere. È possibile ottenere un'onda sinusoidale stabile dopo l'installazione corretta.
L'utilizzo del sensore MR differenziale nel controllo dello spostamento dell'angolo dell'escavatore:

6.2 Sensore RM differenziale che misura piccoli spostamenti
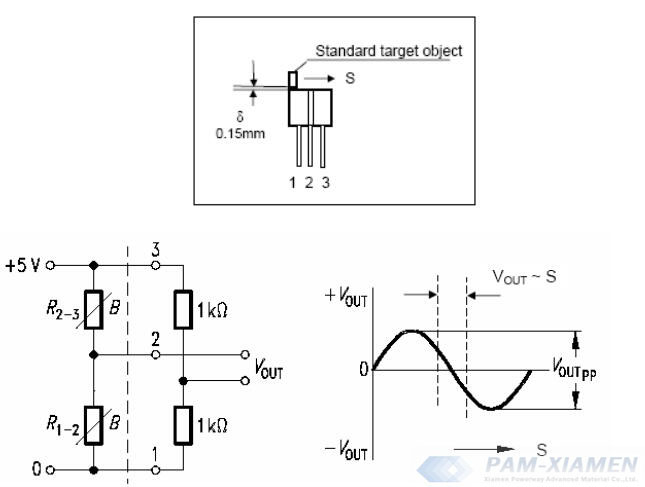
Un oggetto target ferromagnetico standard di una dimensione specifica attraverso il sensore differenziale insieme alla direzione di rilevamento può ottenere un segnale simile all'onda sinusoidale. Il segnale di uscita è lineare entro un intervallo di 1,5 mm vicino alla posizione centrale.
Segni:
- Poiché il sensore si danneggia facilmente, è vietato schiacciare, urtare e graffiare la superficie di rilevamento;
- Il sensore deve essere fissato in modo affidabile e muoversi lungo la direzione di rilevamento nel processo di installazione;
- La temperatura di funzionamento del sensore deve essere compresa tra -30~70 ℃. La temperatura oltre l'intervallo influirà sulla durata;
- La tensione nominale di lavoro e la massima tensione di lavoro del sensore magnetoresistivo differenziale sono rispettivamente di 5V e 10V.
Si prega di leggere il post correlato per ulteriori informazioni sul sensore di magnetoresistenza:https://www.powerwaywafer.com/magnetoresistance-sensor.html

Per ulteriori informazioni, contattaci tramite e-mail all'indirizzo victorchan@powerwaywafer.com e powerwaymaterial@gmail.com.