から販売されている差動磁気抵抗センサーPAM-厦門によってパッケージ化された磁気抵抗センサーの 1 つです。アンチモン化インジウム(InSb)薄膜金属シェルを備えた磁気抵抗器とバイアス磁石。 その結果、出力信号は準正弦波信号になります。 提供される差動磁気抵抗 (MR) センサーの仕様は次のとおりです。
差動磁気抵抗センサー イメージ
1. 差動磁気抵抗センサーのデータシート
この差動磁気抵抗センサーは、Dia のサイズで 300 Ω から 900 Ω の低抵抗を備えています。 10mm。
| 技術的なパラメータ | PAM10-10L | PAM10-10D |
| 最大動作電圧 | DC 10V | DC 10V |
| 定格動作電圧 | DC 5V | DC 5V |
| Vinでの出力オフセット電圧
25℃δ=∞ |
≤130mV | ≤130mV |
| 出力振幅、25℃δ= 0.15mm、
標準ターゲットオブジェクト |
> 900 mV | > 1000 mV |
| 全抵抗R1-3,25℃、
I <1mA、δ=∞ |
220-900Ω | 900-1600Ω |
| 抵抗の非対称性(R12&R13)25℃、δ=∞
|
≤10% | ≤10% |
| カットオフ周波数 | > 20KHz | > 20KHz |
| 作業温度
|
-30〜70℃ | -30〜70℃ |
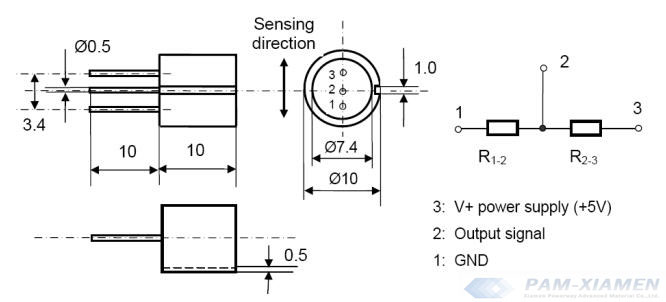
差動 MR センサーの寸法:
2.磁気抵抗センサーとは何ですか?
磁気抵抗効果センサーは、磁性材料の磁気抵抗効果に基づいて作られています。 磁性材料には異方性特性があります。 それを磁化するとき、磁化の方向は、材料の容易軸、形状、および磁化磁場の方向に依存します。 ストリップ状のパーマロイ材料に電流Iを流すと、材料の抵抗は電流の方向と磁化の方向の間の角度に依存します。
磁場B(測定された磁場)が材料に適用されると、元の磁化方向が回転します。 磁化方向が電流に垂直な方向に変わると、材料の抵抗が減少します。 磁化方向が電流に平行な方向になると、材料の抵抗が増加します。 磁気抵抗ベースのセンサーは、一般に4つのそのような抵抗器で構成され、それらを接続してブリッジを形成します。 測定された磁場Bの作用下で、ブリッジの反対の位置にある2つの抵抗器の抵抗値は増加し、他の2つの抵抗器の抵抗値は減少します。
3.磁気抵抗センサーの種類とは何ですか?
磁気抵抗センサーは、基本的に2つのカテゴリに分類できます。
第一に、高磁場の印加において、印加された磁場強度が軟磁性センサー材料を飽和させるのに十分に高い場合、センサー内の磁気ベクトルは、印加された磁場にほぼ平行である。 したがって、非接触磁気抵抗角度センサーは、磁気抵抗高磁場センサーの一般的なアプリケーションです。
第二に、低磁場の適用に関しては、縦方向のレオロジーに対する自然な好みが磁化によって示されるため、ストリップの形状が磁化ベクトルを決定します。 外部磁気はストリップに磁化歪みを引き起こし、MR効果により抵抗を変化させます。 そのため、通常、このパターンでは線形低磁場センサーが使用されます。
磁気抵抗センサーVSホール効果センサー
磁気抵抗センサーの感度と直線性は、磁気コンパスの要件を満たすことができ、すべての面でその性能はホールデバイスよりも大幅に優れています。 MRセンサーの順磁化と逆磁化を交互に行うことで、ヒステリシス誤差とゼロ点温度ドリフトを排除することもできます。 磁気抵抗センサーのこれらの優れた性能により、一部のアプリケーションではフラックスゲートと競合する可能性があります。
4. 差動磁気抵抗センサーはどのように機能しますか?
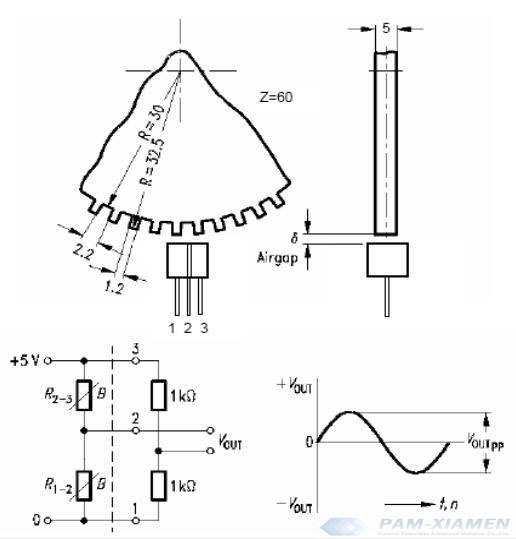
フィルムの磁気抵抗の裏側にバイアス磁場または磁性鉄を課すことは、差動磁気抵抗センサーのコア構造です。 MR1とMR2の磁場は1つずつ増加し、強磁性体または磁石が検出領域を通過するときにMR1とMR2の抵抗が増加します。 ①と③の端にVccの電圧を印加すると、②の端に正弦波が発生します。 次の図を参照してください。

5. 差動磁気抵抗センサーの特性
差動磁気抵抗センサーには多くの特徴があります。
- 広範囲の速度を感知できます。
- 頑丈な金属製のハウジングがあります。
- 信号の振幅は速度とは関係ありません。
- バイアス磁石が内蔵されています。
- 過酷な環境に最適です。
6. 差動磁気抵抗センサーのアプリケーション
差動磁気抵抗センサーの優れた特性により、速度の検出、角度の検出、電気スピンドルのRPMの検出、PCBパンチのRPMの測定、線形小変位の測定など、さまざまなアプリケーションで使用できます。
6.1 差動磁気抵抗センサーによる PCB の RPM の測定
微分磁気抵抗のセンサーは、スロット付きディスク、ギア、ラックなどの強磁性ローターの速度の測定に広く適用されています。 正しく取り付けると安定した正弦波が得られます。
掘削機の角度変位を制御する際の差動 MR センサーの使用法 :

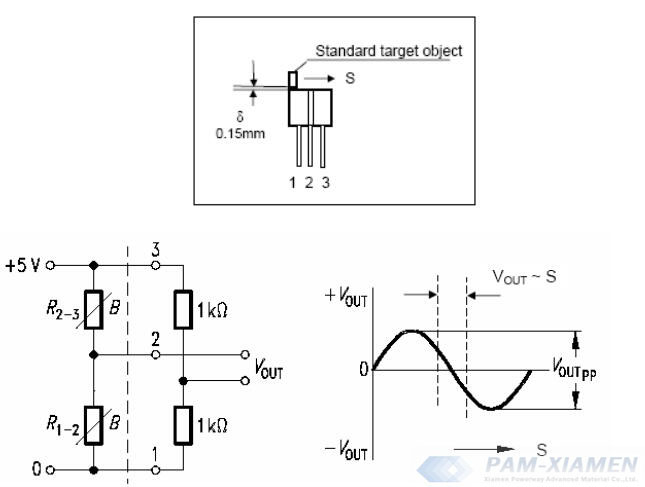
6.2 微小変位を測定する差動 MR センサ
差動センサーを介した特定のサイズの標準的な強磁性ターゲットオブジェクトは、検出方向とともに、正弦波に似た信号を取得できます。 出力信号は、中心位置付近の 1.5mm の範囲内で線形です。
マーク:
- センサーは損傷しやすいため、検出面を絞ったり、衝突させたり、引っかいたりすることは禁じられています。
- センサーは確実に固定され、設置プロセスで検知方向に沿って移動する必要があります。
- センサーの動作温度は-30~70℃です。 範囲を超える温度は寿命に影響します。
- 差動磁気抵抗センサーの定格動作電圧と最大動作電圧は、それぞれ 5V と 10V です。
磁気抵抗センサーの詳細については、関連記事をお読みください。https://www.powerwaywafer.com/magnetoresistant-sensor.html

詳細については、メールでお問い合わせください。 victorchan@powerwaywafer.com と powerwaymaterial@gmail.com.