Дифференциальный магниторезистивный датчик для продажи отPAM-СЯМЫНЬявляется одним из магниторезистивных датчиков, который упаковантонкая пленка антимонида индия (InSb)магниторезистор плюс подмагничивающий магнит с металлической оболочкой. В результате выходной сигнал представляет собой квазисинусоидальный сигнал. Технические характеристики предоставленного дифференциального магниторезистивного (MR) датчика следующие:
Изображение дифференциального магниторезистивного датчика
1. Техническое описание дифференциального магниторезистивного датчика
Этот датчик дифференциального магнитного сопротивления имеет низкое сопротивление от 300 Ом до 900 Ом и размер диам. 10мм.
| Технические параметры | ПАМ10-10Л | PAM10-10D |
| Максимальное рабочее напряжение | 10 В постоянного тока | 10 В постоянного тока |
| Номинальное рабочее напряжение | DC 5V | DC 5V |
| Выходное напряжение смещения при Vin
25 ℃ δ = ∞ |
≤130 мВ | ≤130 мВ |
| Выходная амплитуда, 25 ℃ δ = 0,15 мм,
Стандартный целевой объект |
> 900 мВ | > 1000 мВ |
| Общее сопротивление R1-3,25 ℃,
I < 1 мА, δ = ∞ |
220-900 Ом | 900-1600 Ом |
| Асимметрия сопротивления (R12 и R13) 25 ℃ , δ = ∞
|
≤10% | ≤10% |
| Частота среза | > 20 кГц | > 20 кГц |
| Рабочая температура
|
-30 ~ 70 ℃ | -30 ~ 70 ℃ |
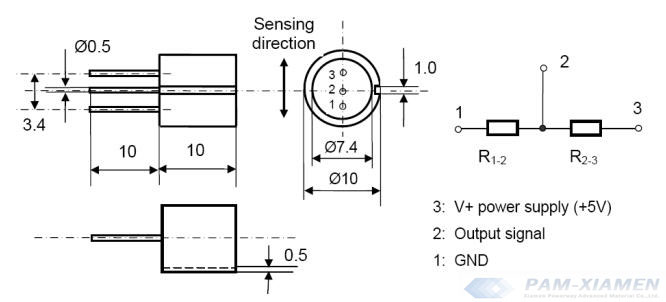
Размеры дифференциального МР-датчика:
2. Что такое магниторезистивный датчик?
Датчик магниторезистивного эффекта выполнен на основе эффекта магнитосопротивления магнитных материалов. Магнитные материалы обладают характеристикой анизотропии. При намагничивании направление намагничивания будет зависеть от легкой оси материала, формы и направления намагничивающего магнитного поля. Когда к материалу пермаллоя в форме ленты прикладывают ток I, сопротивление материала зависит от угла между направлением тока и направлением намагничивания.
Если к материалу приложить магнитное поле B (измеренное магнитное поле), исходное направление намагничивания будет повернуто. Если направление намагничивания изменится на направление, перпендикулярное току, сопротивление материала уменьшится; если направление намагничивания изменится на направление, параллельное току, сопротивление материала увеличится. Магниторезистивные датчики обычно состоят из четырех таких резисторов и соединяют их в виде моста. Под действием измеряемого магнитного поля B значения сопротивления двух резисторов, расположенных в противоположных местах моста, увеличиваются, а значения сопротивления двух других резисторов уменьшаются.
3. Какие типы магниторезистивных датчиков?
Магниторезистивные датчики можно разделить на две категории:
Во-первых, при приложении сильного магнитного поля, когда напряженность приложенного поля достаточно высока для насыщения магнитомягкого материала датчика, магнитный вектор в датчике почти параллелен приложенному полю. Поэтому бесконтактный магниторезистивный датчик угла является обычным применением магниторезистивного датчика с сильным полем.
Во-вторых, что касается приложения слабого магнитного поля, форма полосы определяет вектор намагниченности, потому что естественное предпочтение продольной реологии проявляется намагниченностью. Внешний магнит вызовет искажение намагниченности в полосе, изменяя сопротивление из-за эффекта MR. Таким образом, в этой схеме обычно используется линейный датчик слабого магнитного поля.
Магниторезистивный датчик VS Датчик на эффекте Холла
Чувствительность и линейность датчика магнитосопротивления соответствуют требованиям магнитных компасов, а его характеристики во всех аспектах значительно лучше, чем у устройств Холла. Ошибка гистерезиса и температурный дрейф нулевой точки также могут быть устранены путем чередования прямого и обратного намагничивания MR-датчика. Благодаря превосходным характеристикам магниторезистивного датчика, в некоторых приложениях он может конкурировать с феррозондовым датчиком.
4. Как работает дифференциальный магниторезистивный датчик?
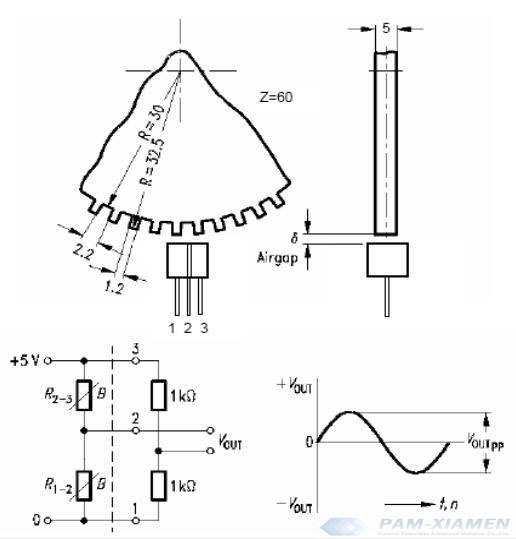
Создание магнитного поля смещения или магнитного железа в задней части магнитного сопротивления пленки является основной структурой дифференциального магниторезистивного датчика. Магнитное поле в MR 1 и MR 2 будет увеличиваться один за другим, что приведет к увеличению сопротивления MR 1 и MR 2, когда ферромагнитные объекты или магнит проходят через зону обнаружения. Подайте напряжение Vcc на конце ① и ③, на конце ② будет синусоида. См. Рис. Ниже:

5. Свойства дифференциальных магниторезистивных датчиков
Есть много характеристик дифференциального магниторезистивного датчика:
- Он может определять скорость в широком диапазоне;
- Имеет прочный металлический корпус;
- Амплитуда сигнала не имеет ничего общего со скоростью;
- Есть встроенный подмагничивающий магнит;
- Лучше всего подходит для суровых условий окружающей среды.
6. Применение дифференциальных магниторезистивных датчиков
Благодаря превосходным свойствам датчика дифференциального магнитного сопротивления, его можно использовать в различных приложениях, таких как определение скорости, угла обнаружения, определение числа оборотов электрического шпинделя, измерение числа оборотов штампа печатной платы, измерение небольшого линейного перемещения и т. Д. В частности:
6.1 Измерение оборотов печатной платы дифференциальным магниторезистивным датчиком
Датчик дифференциального магнитного сопротивления широко применяется для измерения скорости вращения ферромагнитных роторов, таких как шлицевые диски, зубчатые колеса и рейки. Стабильная синусоида может быть получена после правильной установки.
Использование дифференциального датчика MR для управления угловым смещением экскаватора:

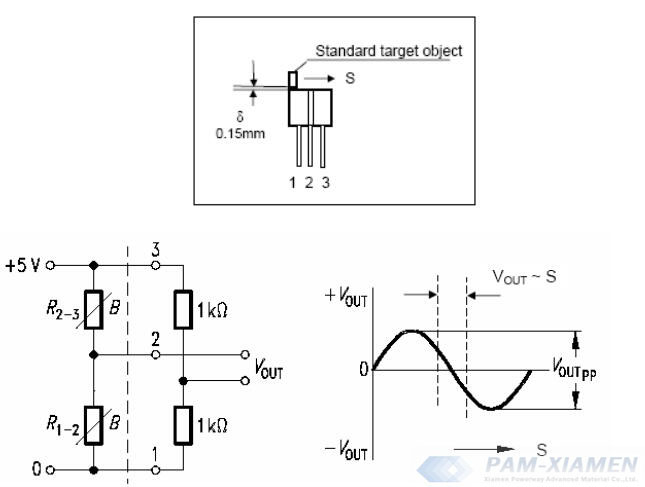
6.2 Дифференциальный МР-датчик, измеряющий небольшое смещение
Стандартный ферромагнитный целевой объект определенного размера через дифференциальный датчик вместе с направлением зондирования может получить сигнал, аналогичный синусоиде. Выходной сигнал является линейным в диапазоне 1,5 мм вблизи центрального положения.
Метки:
- Поскольку датчик легко повреждается, запрещается сжимать, сталкиваться и царапать поверхность обнаружения;
- Датчик должен быть надежно закреплен и перемещаться в направлении считывания в процессе установки;
- Рабочая температура датчика должна быть от -30 до 70 ℃. Температура за пределами диапазона повлияет на срок службы;
- Номинальное рабочее напряжение и максимальное рабочее напряжение дифференциального магниторезистивного датчика составляют соответственно 5В и 10В.
Пожалуйста, прочитайте соответствующий пост для получения дополнительной информации о датчике магнитосопротивления:https://www.powerwaywafer.com/magnetoresistance-sensor.html

Для получения дополнительной информации, пожалуйста, свяжитесь с нами по электронной почте по адресу victorchan@powerwaywafer.com и powerwaymaterial@gmail.com.