Differentialmagnetoresistiv sensor till salu frånPAM-XIAMENär en av magnetoresistiva sensorer, som förpackas avindiumantimonid (InSb) tunn filmmagnetoresistor plus förspänningsmagnet med metallskal. Som ett resultat är utsignalen en kvasi-sinusvågsignal. Specifikationen för differentialmagnetoresistiv (MR) sensor som tillhandahålls är följande:
Differential magnetoresistiv sensorbild
1. Datablad för differentiell magnetoresistiv sensor
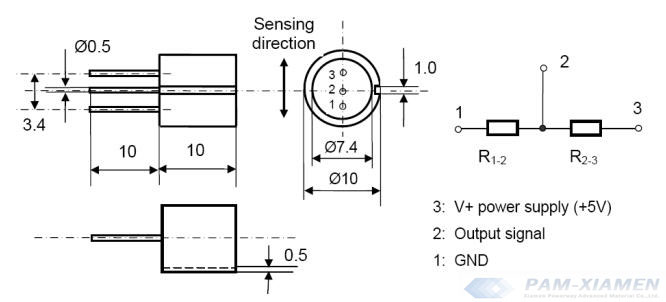
Denna differentialmagnetiska resistanssensor har ett lågt motstånd från 300 ohm till 900 ohm med storleken Dia. 10 mm.
| Tekniska parametrar | PAM10-10L | PAM10-10D |
| Maximal arbetsspänning | DC 10V | DC 10V |
| Nominell arbetsspänning | DC 5V | DC 5V |
| Output Offset Voltage, vid Vin
25 ℃ δ = ∞ |
≤130 mV | ≤130 mV |
| Utmatningsamplitud, 25 ℃ δ = 0,15 mm,
Standard målobjekt |
> 900 mV | > 1000 mV |
| Totalt motstånd R1-3,25 ℃,
I < 1mA, δ = ∞ |
220-900Ω | 900-1600Ω |
| Resistensasymmetri (R12 & R13) 25 ℃ , δ = ∞
|
≤10% | ≤10% |
| Avstängningsfrekvens | > 20KHz | > 20KHz |
| Arbetstemperatur
|
-30 ~ 70 ℃ | -30 ~ 70 ℃ |
Differentiella MR-sensormått:
2. Vad är en magnetoresistiv sensor?
Magnetoresistiv effektsensor är gjord baserad på magnetoresistanseffekten av magnetiska material. Magnetiska material har anisotropiska egenskaper. Vid magnetisering beror magnetiseringsriktningen på materialets lätta axel, formen och magnetiserings magnetfältets riktning. När en ström I appliceras på det remsformiga permalloymaterialet beror materialets motstånd på vinkeln mellan strömriktningen och magnetiseringsriktningen.
Om ett magnetfält B (det uppmätta magnetfältet) appliceras på materialet roteras den ursprungliga magnetiseringsriktningen. Om magnetiseringsriktningen vänder sig till riktningen vinkelrätt mot strömmen, minskar materialets motstånd; om magnetiseringsriktningen vänder sig till riktningen parallellt med strömmen, ökar materialets motstånd. Magnetoresistivt baserade sensorer består i allmänhet av fyra sådana motstånd och ansluter dem till en bro. Under verkan av det uppmätta magnetfältet B ökar motståndsvärdena för de två motstånden som ligger vid motsatta positioner i bron och motståndsvärdena för de andra två motstånden minskar.
3. Vad är magnetoresistiva sensortyper?
Magnetoresistiva sensorer kan i princip delas in i två kategorier:
För det första, vid applicering av högt magnetfält, när den applicerade fältintensiteten är tillräckligt hög för att mätta det mjuka magnetiska sensormaterialet, är den magnetiska vektorn i sensorn nästan parallell med det applicerade fältet. Därför är beröringsfri magnetoresistiv vinkelsensor en vanlig tillämpning av magnetoresistiv högfältssensor.
För det andra, när det gäller tillämpningen av det låga magnetiska fältet, bestämmer formen av remsan magnetiseringsvektorn, eftersom en naturlig preferens för longitudinell reologi visas av magnetiseringen. Den externa magneten kommer att orsaka en magnetiseringsförvrängning i remsan, vilket förändrar motståndet på grund av MR-effekten. Därmed används vanligtvis linjär lågmagnetisk fältsensor i detta mönster.
Magnetoresistiv sensor VS Hall effektsensor
Känsligheten och linjäriteten hos magnetresistanssensorer har kunnat uppfylla kraven för magnetiska kompasser, och dess prestanda i alla aspekter är betydligt bättre än Hall-enheter. Hysteresfel och nollpunktstemperaturdrift kan också elimineras genom omväxlande framåt- och bakåtmagnetisering av MR-sensorn. På grund av dessa överlägsna prestanda hos magnetoresistiva sensorer kan den konkurrera med fluxgate i vissa applikationer.
4. Hur fungerar en differentiell magnetoresistiv sensor?
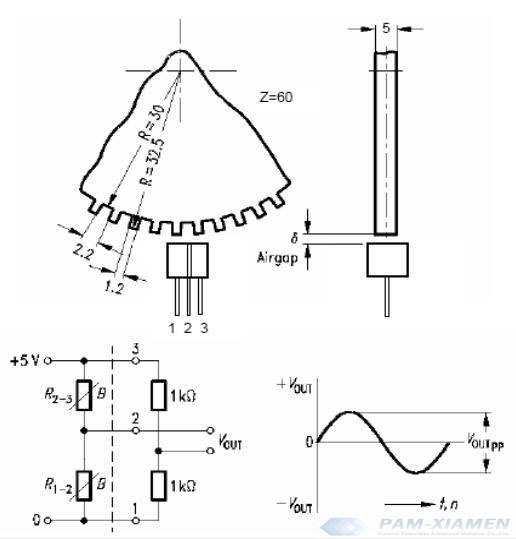
Imponerande förspänningsmagnetiska fält eller magnetiskt järn på baksidan av filmen magnetisk motvilja är kärnstrukturen hos differentialmagnetoresistiv sensor. Magnetfältet i MR 1 och MR 2 kommer att öka en efter en, vilket leder till en ökning av motståndet för MR 1 och MR 2 när de ferromagnetiska föremålen eller magneten genom detekteringsområdet. Applicera en spänning på Vcc i slutet av ① och ③, det kommer att finnas en sinusvåg vid ② änden. Se bild i följande:

5. Egenskaper för differentialmagnetoresistiva sensorer
Det finns många egenskaper hos differentiell magneto-resistiv sensor:
- Det kan känna ett brett spektrum av hastighet;
- Den har ett robust metallhus;
- Signalamplituden har inget med hastighet att göra;
- Det finns en inbyggd förspänningsmagnet;
- Det är bäst för tuffa miljöer.
6. Applikationer för differentialmagnetoresistiva sensorer
På grund av de utmärkta egenskaperna hos differentiell magnetisk resistanssensor kan den användas i olika applikationer, som att detektera hastighet, detektera vinkel, detektera varvtal för elektrisk spindel, mäta varvtal för PCB -stans, mäta linjär liten förskjutning och etc. Specifikt:
6.1 Mätning av RPM för PCB med differentialmagnetisk resistiv sensor
Sensorn för differentiellt magnetiskt motstånd används i stor utsträckning vid mätning av hastigheten hos ferromagnetiska rotorer, som slitsad skiva, kugghjul och kuggstång. En stabil sinusvåg kan erhållas efter korrekt installation.
Användningen av differential MR-sensor för att styra grävmaskinens vinkelförskjutning:

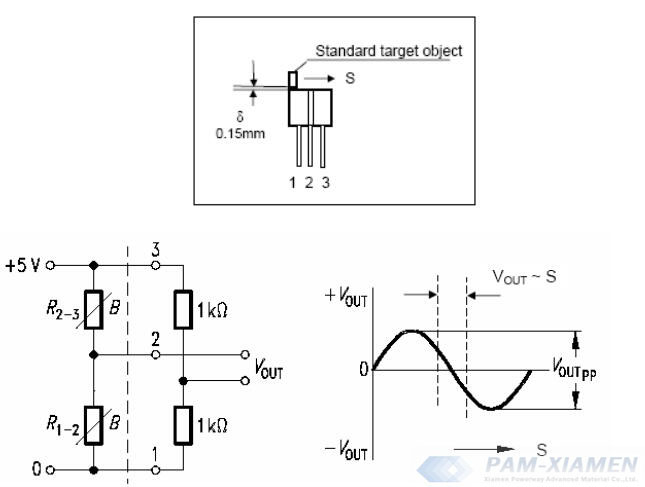
6.2 Differential MR-sensor som mäter liten förskjutning
Ett standard ferromagnetiskt målobjekt i en specifik storlek genom differentialsensorn tillsammans med avkänningsriktningen kan erhålla en signal som liknar sinusvågen. Utsignalen är linjär inom ett område på 1,5 mm nära mittpositionen.
Märken:
- Eftersom sensorn lätt skadas är det förbjudet att klämma, kollidera och repa detekteringsytan;
- Sensorn ska fixeras på ett tillförlitligt sätt och röra sig längs avkänningsriktningen i installationsprocessen;
- Sensorns arbetstemperatur bör vara -30~70 ℃. Temperatur över intervallet kommer att påverka livslängden;
- Den nominella arbetsspänningen och den maximala arbetsspänningen för den differentiella magnetoresistiva sensorn är 5V respektive 10V.
Vänligen läs det relaterade inlägget för mer information om magnetresistanssensorn:https://www.powerwaywafer.com/magnetoresistance-sensor.html

För mer information, kontakta oss via e-post på victorchan@powerwaywafer.com och powerwaymaterial@gmail.com.