Venta de sensor magnetorresistivo diferencial dePAM-XIAMENes uno de los sensores magnetorresistivos, que está empaquetado porpelícula delgada de antimoniuro de indio (InSb)magnetorresistencia más imán de polarización con una carcasa de metal. Como resultado, la señal de salida es una señal de onda casi sinusoidal. La especificación del sensor magnetorresistivo diferencial (MR) proporcionado es la siguiente:
Imagen del sensor magnetorresistivo diferencial
1. Hoja de datos del sensor magnetorresistivo diferencial
Este sensor de resistencia magnética diferencial tiene una baja resistencia de 300 ohm a 900 ohm con un tamaño de Dia. 10 mm.
| Parámetros técnicos | PAM10-10L | PAM10-10D |
| Voltaje máximo de trabajo | DC 10V | DC 10V |
| Voltaje de trabajo nominal | DC 5V | DC 5V |
| Voltaje de compensación de salida, en Vin
25 ℃ δ = ∞ |
≤130 mV | ≤130 mV |
| Amplitud de salida, 25 ℃ δ = 0,15 mm,
Objeto de destino estándar |
> 900 mV | > 1000 mV |
| Resistencia total R1-3,25 ℃,
Yo < 1mA, δ = ∞ |
220-900Ω | 900-1600Ω |
| Asimetría de resistencia (R12 y R13) 25 ℃ , δ = ∞
|
≤10% | ≤10% |
| Frecuencia de corte | > 20 KHz | > 20 KHz |
| Temperatura de trabajo
|
-30 ~ 70 ℃ | -30 ~ 70 ℃ |
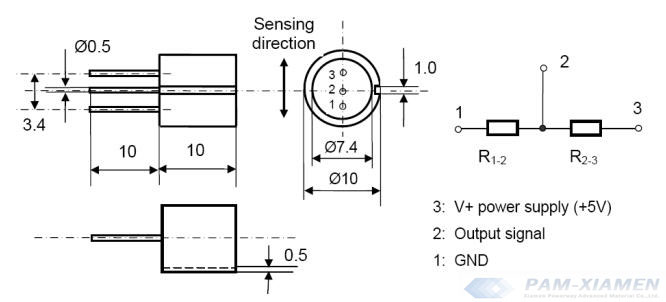
Dimensiones del sensor de RM diferencial:
2. ¿Qué es un sensor magnetorresistivo?
El sensor de efecto magnetorresistivo se fabrica basándose en el efecto de magnetorresistencia de los materiales magnéticos. Los materiales magnéticos tienen la característica de anisotropía. Al magnetizarlo, la dirección de magnetización dependerá del eje fácil del material, la forma y la dirección del campo magnético de magnetización. Cuando se aplica una corriente I al material de permalloy en forma de tira, la resistencia del material depende del ángulo entre la dirección de la corriente y la dirección de magnetización.
Si se aplica un campo magnético B (el campo magnético medido) al material, se rotará la dirección de magnetización original. Si la dirección de magnetización gira en dirección perpendicular a la corriente, la resistencia del material disminuirá; si la dirección de magnetización gira en dirección paralela a la corriente, la resistencia del material aumentará. Los sensores basados en magnetorresistencia generalmente constan de cuatro resistencias de este tipo y las conectan para formar un puente. Bajo la acción del campo magnético B medido, los valores de resistencia de las dos resistencias ubicadas en posiciones opuestas en el puente aumentan y los valores de resistencia de las otras dos resistencias disminuyen.
3. ¿Qué son los tipos de sensores magnetorresistivos?
Los sensores magnetorresistivos se pueden dividir básicamente en dos categorías:
En primer lugar, en la aplicación de un campo magnético alto, cuando la intensidad del campo aplicado es lo suficientemente alta como para saturar el material del sensor magnético suave, el vector magnético en el sensor es casi paralelo al campo aplicado. Por lo tanto, el sensor de ángulo magnetorresistivo sin contacto es una aplicación común del sensor de campo alto magnetorresistivo.
En segundo lugar, en cuanto a la aplicación de campo magnético bajo, la forma de la tira determina el vector de magnetización, porque la magnetización muestra una preferencia natural por la reología longitudinal. El magnético externo provocará una distorsión de magnetización en la tira, cambiando la resistencia debido al efecto MR. Por lo tanto, el sensor lineal de campo magnético bajo se usa generalmente en este patrón.
Sensor magnetorresistivo VS sensor de efecto Hall
La sensibilidad y linealidad del sensor de magnetorresistencia ha podido cumplir con los requisitos de las brújulas magnéticas, y su rendimiento en todos los aspectos es significativamente mejor que el de los dispositivos Hall. El error de histéresis y la desviación de temperatura del punto cero también se pueden eliminar alternando la magnetización directa e inversa del sensor de RM. Debido a este rendimiento superior del sensor magnetorresistivo, puede competir con fluxgate en algunas aplicaciones.
4. ¿Cómo funciona un sensor magnetorresistivo diferencial?
La imposición de campos magnéticos de polarización o hierro magnético en la parte posterior de la película es la estructura central del sensor magnetorresistivo diferencial. El campo magnético en MR 1 y MR 2 aumentará uno por uno, lo que provocará un aumento en la resistencia de MR 1 y MR 2 cuando los objetos ferromagnéticos o el imán atraviesen el área de detección. Aplique un voltaje de Vcc al final de ① y ③, habrá una onda sinusoidal al final de ②. Consulte la Fig. A continuación:

5. Propiedades de los sensores magnetorresistivos diferenciales
Hay muchas características del sensor magneto resistivo diferencial:
- Puede detectar una amplia gama de velocidades;
- Tiene una carcasa de metal resistente;
- La amplitud de la señal no tiene nada que ver con la velocidad;
- Hay un imán de polarización incorporado;
- Es mejor para entornos hostiles.
6. Aplicaciones de sensores magnetorresistivos diferenciales
Debido a las excelentes propiedades del sensor de resistencia magnética diferencial, se puede utilizar en varias aplicaciones, como detección de velocidad, detección de ángulo, detección de RPM del husillo eléctrico, medición de RPM de punzón de PCB, medición de pequeño desplazamiento lineal, etc. Específicamente:
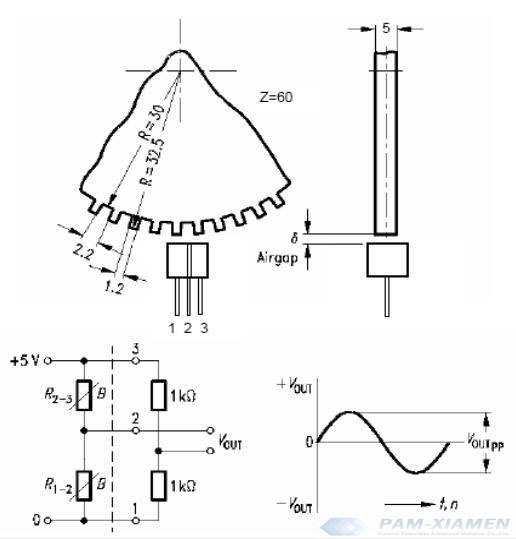
6.1 Medición de RPM de PCB por sensor magnetorresistivo diferencial
El sensor de resistencia magnética diferencial se aplica ampliamente en la medición de la velocidad de rotores ferromagnéticos, como discos ranurados, engranajes y cremalleras. Se puede obtener una onda sinusoidal estable después de instalarla correctamente.
El uso del sensor MR diferencial para controlar el desplazamiento del ángulo de la excavadora:

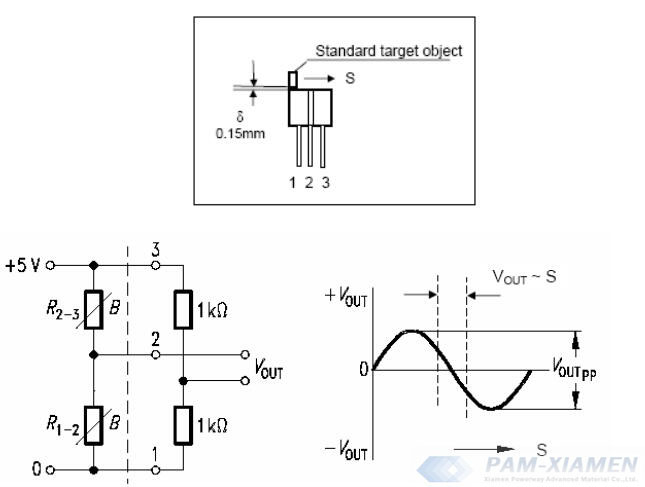
6.2 Sensor MR diferencial que mide pequeños desplazamientos
Un objeto de destino ferromagnético estándar en un tamaño específico a través del sensor diferencial junto con la dirección de detección puede obtener una señal, que es similar a la onda sinusoidal. La señal de salida es lineal dentro de un rango de 1,5 mm cerca de la posición central.
Marcas:
- Debido a que el sensor se daña fácilmente, está prohibido apretar, colisionar y rayar la superficie de detección;
- El sensor debe fijarse de manera confiable y moverse a lo largo de la dirección de detección en el proceso de instalación;
- La temperatura de trabajo del sensor debe ser de -30~70 ℃. La temperatura por encima del rango afectará la vida útil;
- El voltaje de trabajo nominal y el voltaje de trabajo máximo del sensor magnetorresistivo diferencial es respectivamente 5V y 10V.
Lea la publicación relacionada para obtener más información sobre el sensor de magnetorresistencia:https://www.powerwaywafer.com/magnetoresistance-sensor.html

Para obtener más información, contáctenos por correo electrónico a victorchan@powerwaywafer.com y powerwaymaterial@gmail.com.